





Date: 2013
Background: You love racing but don't have the time or finances to go racing for real, and your daily driver (the blue thing) is feeling the wear and tear from all those times the weather is nice, the road is twisty, the engine is running perfectly and no matter how hard you try, the right foot is simply too heavy. What do you do? What I needed was something small, easy to transport and most of all fun vehicle that I could race around on weekends and evenings when I felt the need. Sounds like karting? Sure I could settle there, but the problem was I wouldn't be driving it on a track, I'd mainly be looking at backroads, gravelroads, ice/snow and the like, sounds more like rallying than karting if you ask me. Therefore I need full suspension on all wheels, a powerful engine and a bit more protection than in a typical kart.
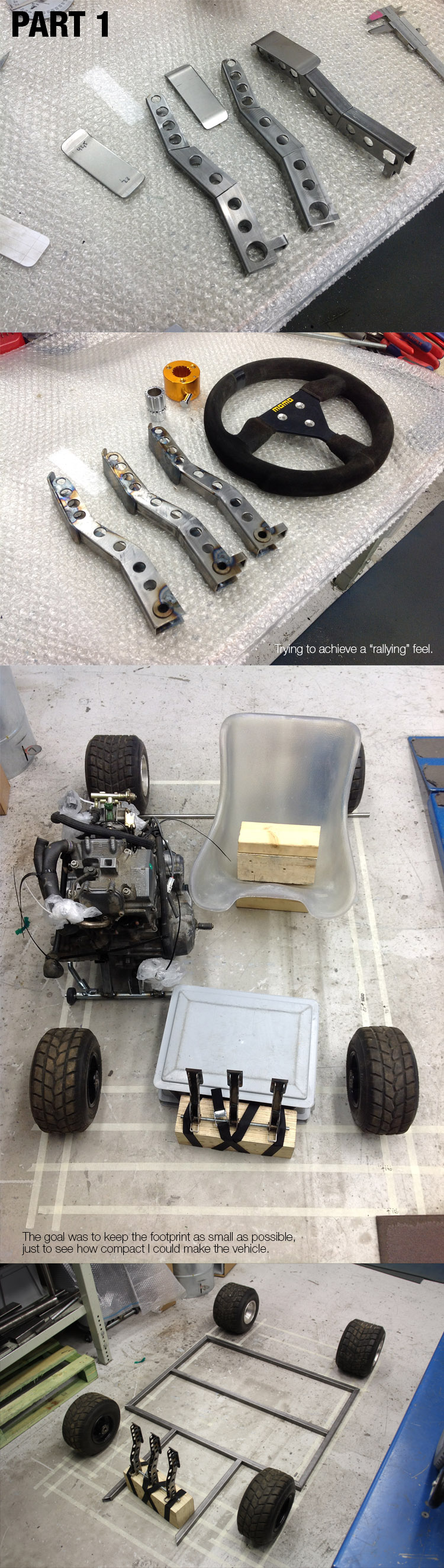




This is how far I got during the summer of 2013 before I had to return to Luleå in the fall. After the pictures above were taken, I finished welding the frame and dismantled the thing to make it ready for transport. It then stood disassembled in Luleå until July 2014 when I finally got hold of a garage where I could continue to work on it.
What I did then was to reassemble it, sort out all the electronics and fuel system and got it ready for a first start up and test run. I felt I needed to check if the drivetrain and suspension actually worked before going into the second phase. The suspension was set too low and too soft, the engine didn't run clean and the chain guard came loose, but damn it was fun to drive!
Ok, then I knew that it at least worked. Time to strip out all the ancillaries and sort out the fuelling and electrical installation properly. This was late August 2014, just when the courses at school began and they ate up all my spare time the entire fall. Fast forward to December 29, with one week left of workshop access and an enormous to-do list. What followed was a few days of intense work as I sorted out proper mounting for the aluminium fuel and oil tank, fuel system, electronics, 4-point harness etc. I also cut away the old floor mounted pedal stand and built a new much sturdier top mounted stand. The last thing on the to-do list that I had time to do was to cover the lower half of the chassis with sheet metal.
Unfortunately I was so busy working on it that I completely forgot to take any photographs before I stripped it once again. It is currently awaiting sand blasting and paint, which will hopefully happen as soon as I get hold of a new garage.
Here's some numbers:
Dimensions: Approx 0.95 m wide, 1.6 m long and 1 m tall.
Engine: Yamaha XT660 2009 fuel injected single-cylinder four stroke, delivering around 50hp and a lot of torque.
Suspension: Double A-arms in the front with Fast-Ace 250lbs/in shocks. Fully adjustable compression, rebound, camber-, caster- and toe-angles. In the rear we have a standard 40mm axle, no diff, and a single fully adjustable 550lbs/in fast-ace shock.
Weight: ~240kg including driver, it has a 48/52 front/rear weight distribution and 50/50 left/right.

